Smooth manifolds are generalisations of smooth curves and surfaces to higher dimensions. A Riemannian metric is a mathematical object defined on a smooth manifold which allows us to talk about distances, angles, and curvatures. A smooth manifold equipped with a Riemannian metric is called a Riemannian manifold. Arguably, the most famous examples of Riemannian manifolds are the three model spaces: Euclidean space, the round sphere, and hyperbolic space.
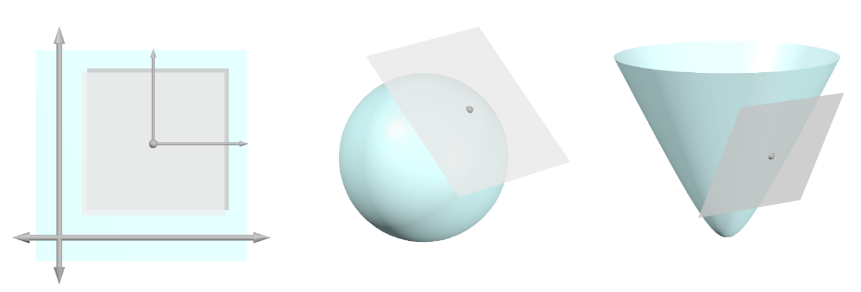
Any smooth manifold admits infinitely many Riemannian metrics. Thus, mathematicians have been interested in the following question: on a given smooth manifold, are there any “distinguished” Riemannian metrics? One interpretation of what it means for a metric to be “distinguished” is to have constant curvature. Two important curvatures associated to any Riemannian metric are the sectional curvature and the Ricci curvature. Riemannian metrics with constant sectional curvature are well-understood: given some standard assumptions, the only Riemannian manifolds with constant sectional curvature are the three model spaces.
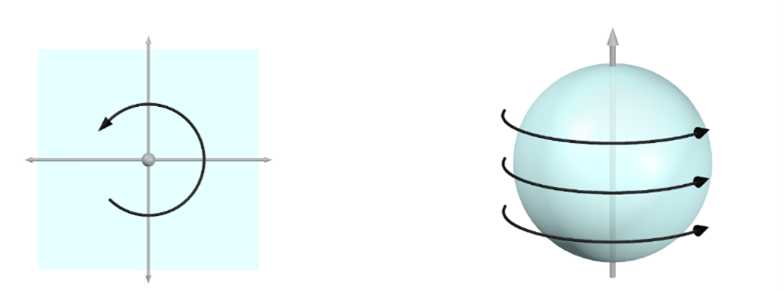
An Einstein metric is a Riemannian metric with constant Ricci curvature; this is equivalent to the metric satisfying an equation called the Einstein equation. Finding Einstein metrics is difficult: one reason for this is that the Einstein equation is a non-linear partial differential equation. Nevertheless, mathematicians have been able to find Einstein metrics is by introducing symmetry. Symmetry means picking a group action on our manifold and restricting our search to metrics which are invariant under the group action.
For my research project, I looked at the case when the manifold is R^n or S^n and the group is the special orthogonal group, SO(n). I found that this symmetry gives no new examples of Einstein metrics. More precisely, I showed that the only SO(n)-invariant Einstein metrics on R^n or S^n are the ones coming from the three model spaces
Joseph Kwong
The University of Queensland
